概要
在目标检测数据集中,ground-truth bounding box在一些情况下经常会有一些内在的歧义。这些歧义通常来源于以下几个方面:a) 不准确的标记;b) 由于物体拥挤产生歧义;c) 物体本身的边界就存在歧义。本文提出了一个新的bbox regression loss。该loss将bounding box transformation与localization variance 联合学习。传统的bbox regression没有考虑ground truth bounding boxes的歧义性。此外,当分类分支的分数较高时,bbox regression 也被默认为是准确的。
方法
网络架构
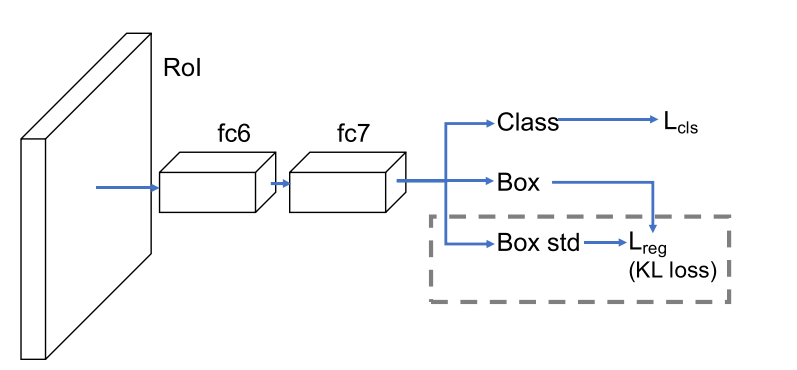
bbox 参数化
不同于R-CNN系列算法对$(x,y,w,h)$进行回归,该文提出对$(x_1,y_1,x_2,y_2)$进行回归,参数化的定义如下所示:
接下来,该文假设坐标之间相互独立,为了简化期间,使用单变量的高斯分布:
其中$\Theta$是学习的参数,$x_e$是估计的bbox坐标,标准差$\sigma$度量估计的不确定性,当$\sigma\rightarrow0$时,意味着网络对于估计的bbox坐标相当确信。
真实框的bbox也能表达成一个高斯分布,当$\sigma\rightarrow0$时,该高斯分布转化为Dirac delta函数:
其中$x_g$是真实框的bbox坐标。
KL损失的bbox回归
从上述的描述可以得知,最终的目标是最小化$P_\Theta(x)$和$P_D(x)$的KL散度:
因此当使用KL散度作为bbox regresssion时表示$L_{reg}$为:
由于$\frac{\log{2\pi}}{2}$和$H(P_D(x))$和估计的参数$\Theta$无关,故:
当$L_{reg}$对$\sigma$求导时,$\sigma$在分母位置,训练初期易出现梯度爆炸,所以为了解决这一问题,使用$a=\log{\sigma^2}$来代替$\sigma$的预测:
类似于smooth L1 loss中对$|x_g-x_e|>1$的处理,KL loss采用同样的处理方式:
方差投票
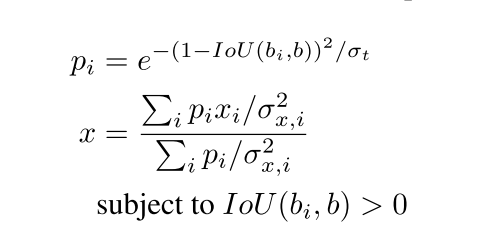
最终的检测结果是一系列包含方差的bbox,为了获得更好的结果可以利用这些方差对近邻的bbox加权式的投票:
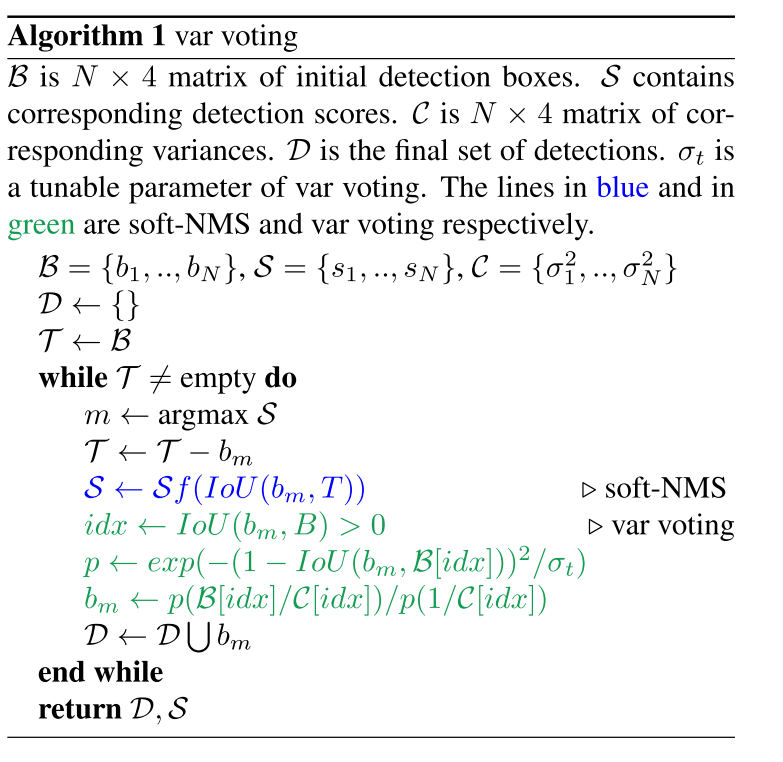
对接近最大分数bbox和最小方差的bbox赋予高权重,新的坐标计算如下所示:
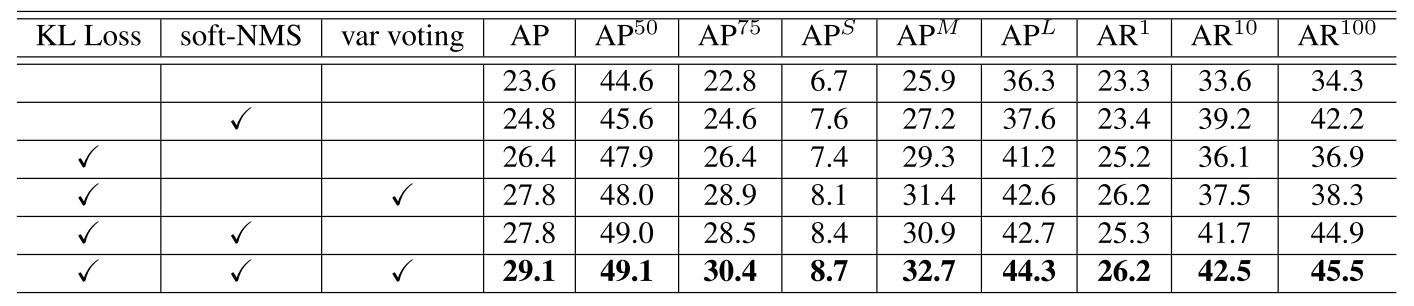
实验
消融实验